Pour apporter des réponses simples à ces questions récurrentes, voici quelques informations.
Les notions sont quasi universelles mais certains matériels auront un fonctionnement propriétaire, sinon ce serait trop simple 🙂
Il va falloir distinguer plusieurs éléments qui sont : le système radio (télécommande+ récepteur), le ou les ESC (variateur électronique de vitesse), le ou les moteurs et peut être un BEC (régulateur de tension) externe.
Préambule :
Pour vulgariser les choses, la télécommande envoi des infos concernant plusieurs canaux au récepteur, qui les décode et les retransmet sur ses sorties, à destination de servos, ESC, etc… (ce signal est dit PPM , c’est un signal carré de largeur d’impulsion variable entre 1000 et 2000 microsecondes, et pour info arduino possède une fonction dédiée Pulse pour lire ou envoyer du PPM 🙂 )
Il en résulte qu’en sortie de récepteur, il y a 3 fils par canal, l’un pour le +5V (rouge ou orange), l’un pour le 0V ou masse (noir ou marron) et le dernier pour le signal (blanc ou jaune).
Vous vous doutez bien que le récepteur doit être alimenté électriquement, ce qui est fait généralement par …………l ‘ESC qui intègre alors un BEC (battery eliminator circuit), en clair un régulateur qui abaisse la tension d’alimentation de l’ESC à du 5V sur le connecteur destiné au récepteur. Donc oui, cette fiche transmet à la fois les infos du Rx (récepteur) vers l’ESC, mais alimente également le Rx par l’ESC.
Il en résulte que si l’ESC fume, il y a de grande chance que vous perdiez aussi la liaison radio……..
Il en résulte également que lorsqu’on alimente, par exemple, un ESC en 12S, si celui-ci est pourvu d’un BEC cela signifie qu’il devra abaisser les 50V du 12S en 5V sur le connecteur Rx……….autant dire qu’un régulateur n’aime pas ce genre de choses et a une forte tendance à chauffer avec ce type de config, et si le BEC fume…………adieu la réception et l’ESC…..
Aussi, les puristes (ou pour les ESC n’intégrant pas de BEC), on utilise un BEC externe, petit circuit spécialement dédié à la fonction d’alimentation du récepteur (et des servos et de tout le matériel en 5V), qui, alimenté directement par la batterie, possède une sortie permettant de le connecter au récepteur via la fiche dédiée, ou, à défaut n’importe quel canal du récepteur.
C’est donc ce que nous vous recommandons pour des tensions d’alimentation supérieures à 6S.
Appairage de la télécommande au récepteur :
- Cas de la GT3X par exemple :
Se référer au manuel, typiquement on doit positionner un cavalier sur une fiche du Rx, alimenter le Rx (qui est donc allumé), puis maintenir un switch (BIND) sur la télécommande tout en allumant celle -ci …………….et zou c ‘est réglé en une fraction de seconde.
Connecter récepteur et ESC :
Dans le cas d’utilisation d’un système radio venant du monde du modélisme voiture, le canal des gaz est le 2 (Channel 2), en avion c’est le channel 3.
Donc nous connecterons la fiche « Futaba » venant de l’ESC, au channel 2 du récepteur, en prenant soin du sens d’insertion (détrompeur).
Sur la GT3, le channel 2 doit être configuré au niveau de la télécommande en mode « reverse », sur la GT2B c’est en mode « Normal »,c’est comme çà je ne sais pourquoi !!!
Pour le canal des gaz comme pour le mode reverse ou normal, le mode d’emploi de votre matériel est à considérer avant nos conseils évidemment…..

- Cas de 2 ESC ou plus, branchés sur le même canal :
Si les ESC possèdent un BEC, il est nécessaire de n’utiliser qu’un seul des BEC disponibles afin de ne pas créer une pagaille électrique revenant à brancher plusieurs générateurs ensemble.
Pour ce faire, on utilise un câble parallèle dit « Y » qui va permettre à chaque ESC de recevoir l’info du Rx, seulement on aura pris soin de déconnecter le fil rouge (+5V) de toutes les fiches des ESC sauf un. (on garde le rouge de la fiche Rx bien entendu)



Failsafe :
Le failsafe, comme son nom l’indique, est une sécurité du récepteur en cas de problème, que l’on peut activer ou non.
Cette sécurité agit de la manière suivante : si le récepteur ne reçoit pas d’informations , ou pas d’informations cohérentes de la part de la télécommande, il se met en sécurité, ce qui a pour effet d’envoyer un signal que vous aurez programmé avant, sur ses sorties.
Il est particulièrement utile, et même nécessaire selon nous, à savoir que si la liaison avec la télécommande est rompue, nous configurerons le failsafe pour qu’il envoit une info de type neutre ou freinage très léger à l’ESC.
Il faut vous référer au manuel de votre télécommande pour activer et paramétrer le failsafe; il s’agit souvent d’un micro-interrupteur présent sur le récepteur sur lequel on appuie une fois, on positionne la télécommande en position requise (gâchette au neutre ou freinage super light) puis on appuie de nouveau sur le micro-switch……..failsafe paramétré.

Calibrage des ESC :
En général, les ESC nécessitent un calibrage pour fonctionner correctement, c’est à dire qu’on lance une séquence « d’apprentissage » durant laquelle l’esc va nous demander de mettre la gâchette de la télécommande au neutre, puis plein gaz, puis freinage max, afin d’enregistrer les paramètres extrêmes que peut générer votre télécommande.
Cette étape est primordiale pour éviter toute zone « morte » sur la gâchette et bénéficier de 100% de l’amplitude avec un neutre fiable.
Sens de rotation du moteur Brushless :
Un brushless possède 3 fils , plus une nappe avec un connecteur dans le cas d’un sensored.
- Mode sensorless :
Si vous souhaitez fonctionner en sensorless, branchez n’importe comment les 3 fils moteurs à l’esc puis testez.
Si le sens de rotation ne vous convient pas, il vous reste à intervertir 2 fils sur les 3, au pif, et le tour est joué, c’est easy et sans risque.
- Mode sensored :
Alors là, pas de bêtises sinon ………..moteur et/ou esc = poubelle
1Vous connectez la nappe de fils « sensor plug » au port sensor de l’ESC, un détrompeur est censé vous éviter toute bêtise.
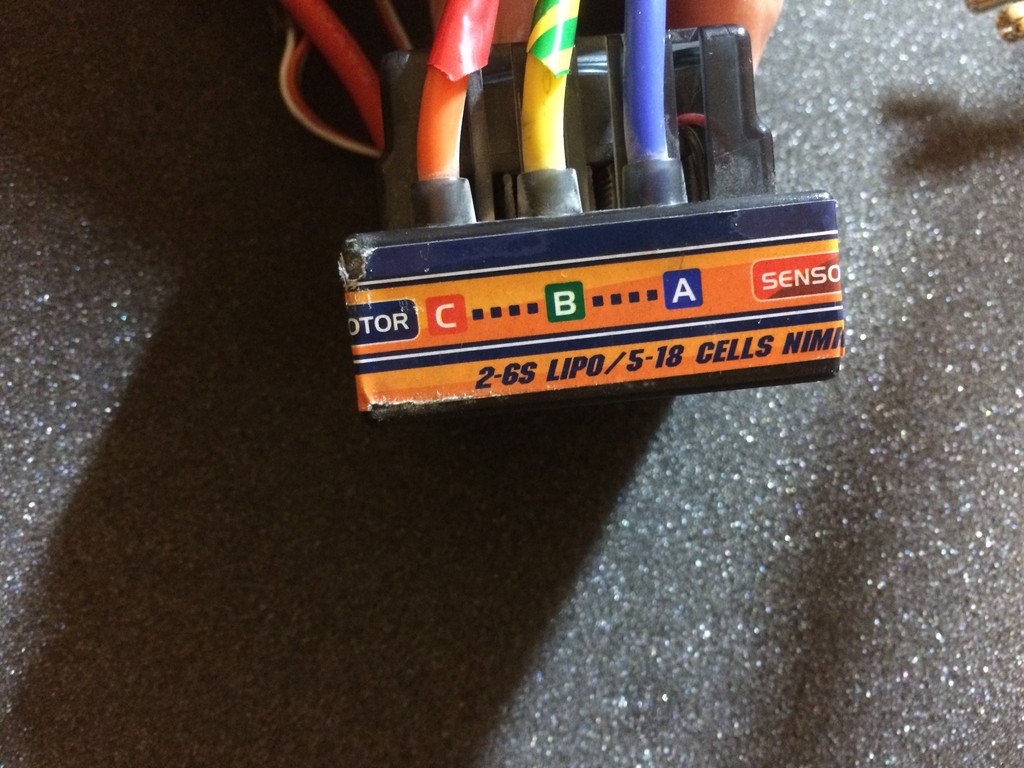
2Vous connaissez les phases A,B,C de votre moteur car c’est un Overion et on a repéré cela pour vous 🙂 , il ne vous reste qu’à connecter le fil phase A du moteur avec la sortie phase A de l’esc, idem pour B et C.
Testez avec 10-15% de gaz max et si çà démarre pas ne forcez pas, surtout pas, appelez le SAV, un ami , ou demandez au public!!


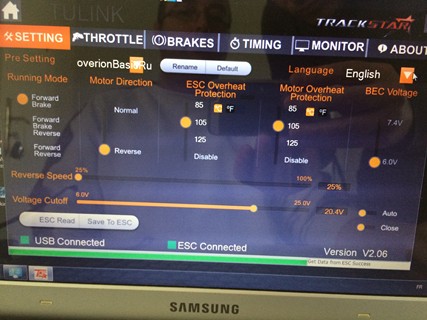
3Votre moteur fonctionne enfin en sensored et c’est du bonheur, sauf qu’il tourne pas dans le bon sens………. seule solution : configurer le sens de rotation en paramétrant l’ESC avec sa petite carte de programmation et/ou son superlogiciel qui veut pas s’installer sur votre PC :-), auquel cas, changez de PC 🙂

Le sens du moteur en sensored ne peut être efficacement géré que de cette façon, une autre méthode (mécanique) consiste à trouver une autre combinaison des phases moteurs avec les phases ESC, mais ce n’est pas l’idéal, voir nos commentaires sur les moteurs OVERION et le test sensored vs sensorless.
Remarque : vous pouvez tester le moteur en mode sensorless si vous voulez être sûr qu’il fonctionne, auquel cas ne pas brancher la nappe de fils des sensors et appliquer la méthode sensorless.

J’ai un moteur brushless 1000kv je veux réalisé genre d’un drone statique sur un seul axe sur les deux extrémités deux moteur brushless menu de deux ESC (un pour chaque moteur) je ne sais pas comment calibré mes ESC toute en sachant que je veux régler la vitesse de rotation des hélices à l’aide de deux potentiomètres (relier vers une carte arduino uno pour chaque moteur un esc)
De l’aide s’il vous plaît j’ai déjà cramé deux esc à cause des testes
Je ne sais pas comment calibré
Help
Merci
Bonjour,
Réponse tardive je n’avais pas vu votre commentaire classé en spam désolé……..
Curieux projet mais bon celà vous regarde 🙂 ,
1/ trouvez la notice de vos esc et à défaut le calibrage des esc de type avion se réalise généralement par la télécommande en démarrant gaz à fond, un bip est émis par les esc, puis ensuite on redescend le manche, gaz au minimum, et hop l’affaire est réglée.
Procédure à réaliser sans hélices évidemment.
Pour d’autres esc, il faut suivre les préconisations du fabricant (contactez le vendeur)
2/ calibration par arduino : il faudra donner la séquence qui va bien en utilisant la fonction Pulse qui envoit un signal PPM , seul reconnu par les esc, la valeur varie de 1000 à 2000 (ce sont des microsecondes)
Bonne continuation
Yann
Bonjours, je vais bientôt participer a un genre de concours de voiture de piste 1/10 électrique, mais je n’ai pas compris le réglement moteur:
• Les autres paramètres maximaux du moteur sont: FWD cont./Burst Current
40A / 180A ;
• BWD cont./Burst Current 20A / 90A ;
vous pourriez m’expliquer svp? au début je me suis dit que c’était l’ampérage maximale en continu et en pointe mais en allait voir le réglement de l’autre catégorie 1/10 qui cours avec nous, leur valeurs étaient:
: FWD continuous: 160A / BurstCurrent :
1200A
alors ça me semble beaucoup, surtout que leurs moteur sont limité a 200w.
je sais pas si je suis très clair mais si vous pouviez m’aider ça m’arrangerais.
Merci de votre réponse et bonne journée
Visiblement le reglement vous bride , les termes FWD et BWD sont forward et backward donc marche avant et marche arriere, avec des intensités continues et et en pic, enfin 200watts en compet çà me semble ridicule même en 2S donc je pense qu’il y a un loupé j’imagine plus un max à 500-1000watts et genre 2000W pour du 1/5eme. cela dit je ne suis pas compétent sur les voitures RC , moi c’est avions et mountainboards 🙂 Bien amicalement. Yann
Bonjour,
Je voudrais piloter 2 esc avec la même télécommande.
Mais la télécommande se réinitialise lorsque je me synchronise avec le second esc.
Faut-il changer de contrôleur/télécommande?
Merci d’avance,
Bonjour, Normalement c’est extra simple comme opération mais il faut supprimer le fil rouge +5V d’une des ESC (au choix) si ceux-ci sont équipés de BEC, on connecte en parrallele les – et le signal et zou c’est parti. On synchronise une fois la telco avec un esc et elle ne doit se désynchroniser sinon faut contacter le vendeur de teleco ou du recepteur car ces éléments n’ont rien à voir à moins de faire une iversion de polarité qqpart (à vérifier). Bonne continuation
Bonjour,
Merci pour ces explications !
J’ai une petite question qui me tarabusque… Lorsqu’on utilise un moteur Brushless avec un ESC, c’est la fréquence de pilotage de l’ESC qui fait la vitesse de rotation du moteur (principe de fonctionnement d’un moteur synchrone).
Du coup, j’ai du mal à comprendre: Comment l’ESC connaît la valeur de kv du moteur pour piloter correctement en fréquence ?
Sauriez vous répondre à ma question, s’il vous plaît ?
Bonne journée !
Alex
Hello,
L’esc n’a pas besoin de connaître le kv du moteur puisque le kv est fonction du nombre de poles magnétiques (bobines) et du nombre de spires par bobine. L’esc dispatch de bobine en bobine ce pourquoi plus il y a de poles plus le kv est faible et de même plus il y a de spires par bobinage plus le kv est faible
Bonjour,
Ha oui, tout simplement.
Merci beaucoup, c’est très clair !
Bonne journée,
Alex